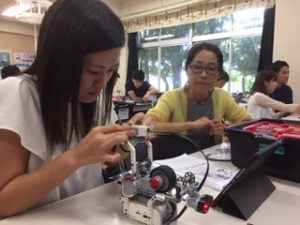
ロボットができあがったら、センサーの取り付け。
ロボットがテザーと言うローブを上り、宇宙ステーションで止まらなくてはならないのです。
センサーは障害物まで何cmまで近づいたら反応するのか、そして、止まるのかプログラミングしていきます。
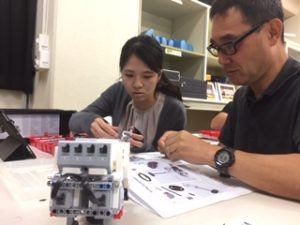
加えて、新たなモーターを取り付けます。
このモーターはピンポン玉を宇宙ステーションまで運び上げ、ステーションにピンポン玉を置くために使うものです。
このモーターもどのタイミングで、何回転させるのか、速さをどうするのか緻密に考えてプログラミングをしていきます。
先生たちの試行錯誤が始まります。